回路は以下のようになります。
左上の2個のPICがモーターコントロール用でそれぞれ2個のモーターを制御します。
左下のPICはサーボコントロール用で2個のサーボを制御出来ますが、今はラダーサーボ1個だけ接続しています。
USB通信部分はオプティマイズさんのMINI EZ-USBを使っています。
このキットはCypressのEZ-USBというUSB I/F内蔵のワンチップCPUを使っていて、Cの開発環境もチップメーカーのWebから無料で入手出来ます。
今回はこの中のサンプルにあるBULK TESTを一部変更して使用しています。
また、PC側のUSBの部分は同じくオプティマイズさんのカメレオンUSBライブラリを使用しています。
ソフトとしては15ms毎に8ByteバイトのBULK転送を行っています。
このうち4Byteを4つのモーターに割り当て、2Byteをサーボ制御(今はラダーのみ)に割り当てています。
MINI EZ-USBの信号のうち今回使用するのは以下の信号です。()内はピン番号です
PA4(B1) PICからのACK入力
PB0-7(B9-B2) データ入出力
PC0(A2) モーター1・2制御PICへのCS出力
PC1(A3) モーター3・4制御PICへのCS出力
PC2(A4) サーボ1・2制御PICへのCS出力
USB通信の部分は余り汎用性がないと思うので公開していませんが、必要な人がいるようであればソースも公開します。
次にPIC16F84と東芝のモータードライバーTA8440Hを使った、モーターとサーボのコントロール部分です。
回路は以下のようになります。
左上の2個のPICがモーターコントロール用でそれぞれ2個のモーターを制御します。
左下のPICはサーボコントロール用で2個のサーボを制御出来ますが、今はラダーサーボ1個だけ接続しています。
PICのソースを以下に添付します。
モーター制御用PICソース サーボ制御用PICソース
モーター制御はEZ-USBからの割り込みをトリガーにして、2つのモーターの制御データをデータバスから2回読み出します。モーターの速度制御自体はPWM制御で行います。
サーボ制御もEZ-USBからの割り込みをトリガーにして、2つのサーボ制御データをデータバスから2回読み出します。サーボ制御はデータに基づいて1msから2msの幅のパルスを15ms周期で発生させています。
出来上がった基板は元の気密室には入らないので、モーターと同じ保存容器の中に入れ前部に取り付けます。
現状では電装系はここまで。あと1個アナログ入力のあるPICを増設して、水圧、温度などの情報をPCに送り、USBハブを繋いでUSBカメラを接続しPC上で動画像を見ることが出来るようにする予定です。
USBハブは一度実験してみたのですが、ハブ経由ではカメラは認識するのですが何故かEZ-USBを認識してくれなかったため、別のハブで実験する予定です。
 次に今までは塩ビパイプを組み合わせて作っていたスラスターですが、ちょうど良い太さの物が無く大きさを変えて実験出来なかったので、今回MODELAを使ってケミカルウッドの削りだしで作ってみました。
次に今までは塩ビパイプを組み合わせて作っていたスラスターですが、ちょうど良い太さの物が無く大きさを変えて実験出来なかったので、今回MODELAを使ってケミカルウッドの削りだしで作ってみました。
MODELAというのはROLAND DGから出ている小型のNC加工機で、私が入手したのは既に生産終了したMDX-3という機械です。
まず3Dのソフトで形状を作って、DXF形式で保存、これを専用のソフトから出力するだけで右の写真のような形状を削りだしてくれます。手で削り出しにくい凹型も簡単に作れます。
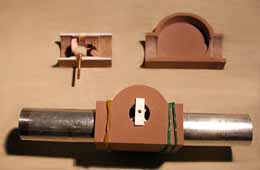 これをとりあえず2つ削りだして、試験用のスラスターを作りました。写真下。外側の白い部分は軸の仮止め用のプラ版です。
これをとりあえず2つ削りだして、試験用のスラスターを作りました。写真下。外側の白い部分は軸の仮止め用のプラ版です。
これまでの塩ビパイプ製のものはアルミパイプの内側に固定用の塩ビパイプがあり、水の抵抗になっていましたが、今回試作したものは固定はアルミパイプの外側で行うため抵抗が少なくなり、また軸の回りに吸水用の穴が開いているため効率も上がったようです。
簡単に修正出来て寝ている間に小人さんが削っていくれるのでバリエーションを作りました。右上は羽部を大きくしたもの、左上は水車でなくギアを組み込んで通常のスクリューにしたもの。
大きくした物はまだ試験していませんが、スクリュータイプはギアの部分が大きな抵抗になり使い物になりませんでした。
とりあえず今(04.02.07)はここまで。
また製作が進んだら更新します。