偟傫偐偄3300丂悈怺3300mm丄1.3婥埑傊偺挧愴
丂帋嶌偦偺1 帋嶌偦偺2
(婾)儊僇僯儅儖偺儁乕僕偵傕彂偄偨偺偱偡偑奀梞壢妛媄弍僙儞僞乕偺堦斒岞奐偱RC愽悈娡偺僨儌傪尒偰偒傑偟偨丅
擔杮偱傕廫杮偺巜偵擖傞偱偁傠偆愽悈娡偑廫惽埲忋乮擔杮岅偑曄偱偡偑乯僨儌偟偰偄傞偺傪尒傟偽岺嶌岲偒偺恖娫偲偟偰帺暘偱傕嶌傝偨偔側傞偺偼摉慠偱偡丅
偲偄偆偙偲偱棃擭偺堦斒岞奐傑偱偵姰惉偝偣傞偙偲傪栚昗偵惢嶌傪奐巒偟傑偟偨丅
嵟嬤偼擔杮偱傕愽悈娡僉僢僩偑弌偰偒偰偄傞偺偱丄偦傟傪攦偭偰傕椙偄偺偱偡偑丄弌偰偄傞偺偼孯梡娡偽偐傝側偺偱丄愽悈挷嵏掵偑梸偟偄巹偼偄偒側傝姰慡帺嶌偱偡丅
梫媮巇條
- 悈怺3.3m偱偺峴摦偑壜擻丅
- 桳慄傑偨偼柍慄偵傛傞僐儞僩儘乕儖丅
- 桳慄側傜偽價僨僆僇儊儔傪搵嵹偟偰塮憸傪尒側偑傜憖廲偱偒傞傛偆偵偡傞丅
- 慜恑/屻恑丄嵍塃慁夞丄忋徃/壓崀丄僺僢僠忋壓偺4ch僐儞僩儘乕儖丅
- 埑椡僙儞僒丄嫍棧僙儞僒丄僺僢僠妏僙儞僒丄儘乕儖妏僙儞僒憰旛丅
- 忋婰僙儞僒傪梡偄偰堦掕怺搙丒崅搙偱偺峲峴丄僺僢僠丄儘乕儖偺巔惃惂屼丅
- 儌乕僞乕僐儞僩儘乕儖偼惓揮丄媡揮傪PWM偱惂屼丅
- 庡悇恑婡偺摦椡揱払偼儅僌僱僢僩僇僢僾儕儞僌丅
- 揹幵偱偺塣斃傪峫偊慡挿50cm埲壓丅
奜宍
乽偟傫偐偄6500乿偐乽傢偩偮傒乿偺偳偪傜偐偵偟傛偆偲巚偭偰偄偨偺偱偡偑丄RC僒僽傪傗偭偰偄傞恖偐傜堦幉娡偺応崌丄僗僋儕儏乕偺夞揮偺斀摦偱偐側傝慏懱偑孹偔偲偄偆榖傪暦偒傑偟偨丅僼儖僗儘僢僩儖偵偡傞偲恀墶傑偱孹偔偲偐丅
偦傟傪墴偝偊傞偨傔偵偼乽偟傫偐偄6500乿偺傛偆偵慏懱嵍塃偵悅捈僗儔僗僞乕偑偁傞曽偑桳棙偦偆側偺偱偲傝偁偊偢偟傫偐偄偱偄偔偙偲偵偟傑偡丅
奜宍偑偟傫偐偄偱怺搙偑3.3m側傜偽乽偟傫偐偄3.3乿偵側傝偦偆偱偡偑丄偙偺柤徧偼婛偵僀儔僗僩儗乕僞乕偺惵堜偝傫偑僩僀儔僕夵憿愽悈娡偱巊梡偝傟偰偄傑偡偺偱mm扨埵偵偟偰乽偟傫偐偄3300乿偲偟傑偟偨丅
惂屼宯
 惂屼宯偼嵟廔揑偵偼塃恾偺傛偆偵側傞梊掕偱偡丅
惂屼宯偼嵟廔揑偵偼塃恾偺傛偆偵側傞梊掕偱偡丅
嵟弶偼僐儞僩儘乕儖擖椡捈寢偱妋擣偟偮偮丄彊乆偵僙儞僒擖椡傪僼傿乕僪僶僢僋偟埨掕摦嶌傪栚巜偟傑偡丅
桳慄偱傕柍慄偱傕巊偊傞傛偆偵惂屼晹傊偺擖椡怣崋偼儔僕僐儞偺僒乕儃傊偺怣崋僼僅乕儅僢僩偵崌傢偣傑偡丅
僙儞僒偲偟偰偼怺搙傪應傞偨傔偵埑椡僙儞僒偲悈掙傑偱偺嫍棧傪應傞嫍棧僙儞僒偱堦掕怺搙丄堦掕崅搙乮偲偄偆偺偩傠偆偐乯偱偺峲峴傪僒億乕僩丅
傑偨僺僢僠幉偲儘乕儖幉偺孹幬傪専弌偟巔惃偺惂屼傕峴偄傑偡丅
恾偺揰慄偱婡擻傪暘偗偦傟偧傟堦屄偺PIC傪妱傝摉偰傞偮傕傝偱偡丅
婡夿偵棅傝偡偓傞偺偼椙偔側偐偭偨偲僐乕僶僢僋偺僊儖僼僅乕僪娡挿偑斀徣偟偰偄傑偟偨偑丄帺摦壔偱偒傞晹暘偼帺摦壔偡傞偮傕傝偱偡丅
嬱摦宯
 偙偙偐傜偼栂憐偩偗偱側偔幚嵺偵庤傪摦偐偟傑偡丅傑偢僗儔僗僞乕傪帋嶌偟傑偟偨丅
偙偙偐傜偼栂憐偩偗偱側偔幚嵺偵庤傪摦偐偟傑偡丅傑偢僗儔僗僞乕傪帋嶌偟傑偟偨丅
幨恀偵偁傞偺偼僗儔僗僞乕偺僷僀僾偺捈宎偑20mm偱塇晹偺捈宎偑25mm丄暆偑15mm偱偙傟傪6V嬱摦偺RF-370儌乕僞乕捈寢偱摦嶌偝偣偨偲偙傠丄偡偙偟僩儖僋晄懌偺傛偆偱偡丅
塇晹偺暆傪10mm偲偟晧壸傪尭傜偟偰捈寢偵偟偰傒傑偟偨丄僩儖僋揑偵偼椙偄傛偆偱偡偑塇偑彫偝偔側偭偨暘悈検偑尭偭偰偟傑偄傑偟偨丅
僩儖僋偲悈検傪椉棫偝偣傞偨傔擇偮偺塇晹傪慻傒崌傢偣傞宍偺僗儔僗僞乕傪帋嶌偟偰傒傑偡丅
 師偵庡悇恑婡丄偳偺儌乕僞乕傪壗V偱嬱摦偟丄偳偺掱搙尭懍偟偰丄偳傟偖傜偄偺戝偒偝偺僗僋儕儏乕傪夞偣偽偪傚偆偳椙偄悇椡偑摼傜傟傞偺偐慡偔傢偐傜側偄偺偱丄帋嶌堦崋偱偼僗僋儕儏乕捈宎50mm偲偟傑偟偨丅偙傟傪夞偟側偑傜儌乕僞乕傗尭懍斾傪寛傔偰偄偒傑偡丅
師偵庡悇恑婡丄偳偺儌乕僞乕傪壗V偱嬱摦偟丄偳偺掱搙尭懍偟偰丄偳傟偖傜偄偺戝偒偝偺僗僋儕儏乕傪夞偣偽偪傚偆偳椙偄悇椡偑摼傜傟傞偺偐慡偔傢偐傜側偄偺偱丄帋嶌堦崋偱偼僗僋儕儏乕捈宎50mm偲偟傑偟偨丅偙傟傪夞偟側偑傜儌乕僞乕傗尭懍斾傪寛傔偰偄偒傑偡丅
僗僋儕儏乕偼乽偟傫偐偄6500乿偺恀屻傠偐傜偺幨恀傪嶲峫偵1mm岤偺恀鐹斅偐傜嶰枃偺塇傪愗傝弌偟丄恀鐹僷僀僾偵僄億僉僔僷僥偱屌掕偟傑偡丅
弶傔偼敿揷晅偗偟傛偆偲偟偨偺偱偡偑擇枃栚傪敿揷晅偗偟傛偆偲偡傞偲侾枃栚偺敿揷偑梟偗偰庢傟偰偟傑偆偺偱偁偒傜傔傑偟偨丅
婛偵晅偗偨晹暘偺曻擬傪偆傑偔偡傟偽椙偄偺偱偟傚偆偑帋嶌側偺偱庤傪敳偗傞偲偙傠偼敳偒傑偡丅傑偨塇帺懱傕杮暔偼偹偠傟偑擖偭偰偄傑偡偑丄偲傝偁偊偢暯柺偺傑傑偱偡丅
 偙偺僗僋儕儏乕傪傑偢偼RF-370儌乕僞乕偱6V嬱摦偺捈寢偱摦偐偟偰傒傑偟偨丅
偙偺僗僋儕儏乕傪傑偢偼RF-370儌乕僞乕偱6V嬱摦偺捈寢偱摦偐偟偰傒傑偟偨丅
僩儖僋揑偵偼偁傑傝栤戣側偝偦偆偱偡偑夞揮懍搙偑憗偡偓丄儅僌僱僢僩僇僢僾儕儞僌偑捛偄偮偒偦偆偵偁傝傑偣傫丅
師偵幨恀偺傛偆偵僊傾傪擖傟偰尭懍斾4.2:1偱摦偐偟偰傒傑偟偨丅偙傟側傜偽夞揮懍搙傕棊偪悇椡傕栤戣側偝偦偆偱偡丅
 儌乕僞乕偲僗僋儕儏乕偼晛捠偺RC愽悈娡偱偼僗僞儞僠儏乕僽傪捠偟偰捈寢偟偰偄傑偡偑丄3300偱偼儅僌僱僢僩僇僢僾儕儞僌偲偟傑偡丅
儌乕僞乕偲僗僋儕儏乕偼晛捠偺RC愽悈娡偱偼僗僞儞僠儏乕僽傪捠偟偰捈寢偟偰偄傑偡偑丄3300偱偼儅僌僱僢僩僇僢僾儕儞僌偲偟傑偡丅
偙傟偼帴愇偺媧拝偲斀敪傪棙梡偟偰旕愙怗偱摦椡傪揱払偡傞曽幃偱偡丅
偙傟側傜悈枾幒偺暻墇偟偵摦椡傪揱払偡傞偙偲偑弌棃傑偡丅悇恑偵廫暘側僩儖僋傪揱偊傜傟傞偐偼幚尡偟偰傒側偄偙偲偵偼傢偐傝傑偣傫偑丄悈枾幒偵僗僋儕儏乕幉偐傜楻悈偟偰偔傞帠偑側偄偺偱埨怱偱偡丅
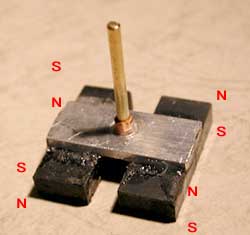
朹偺椉抂偑N偲S偵側偭偰偄傞朹帴愇偑庤尦偵偁傟偽椙偐偭偨偺偱偡偑丄桳偭偨偺偼棤昞偱N偲S偵側偭偰偄傞傕偺偩偭偨偺偱僇僢僾儕儞僌偺曅懁偱2偮偢偮丄寁4偮巊偆帠偵偟傑偡丅
幨恀偺傛偆偵H宆偵慻傫偱偄傑偡丅H偺悅捈晹暘偵2偮偺帴愇傪忋柺偑N偲S偵側傞傛偆偵暲傋丄H偺悈暯晹暘偼傾儖儈斅偱帴愇娫傪屌掕偟拞怱偵庢傝晅偗梡偺寠傪奐偗傑偡丅
 杮暔偺偟傫偐偄偼懬偱嬋偑傞偺偱偼側偔丄僗僋儕儏乕偺曽岦帺懱傪曄峏偟偰嬋偑傞傛偆偵側偭偰偄傑偡丅
杮暔偺偟傫偐偄偼懬偱嬋偑傞偺偱偼側偔丄僗僋儕儏乕偺曽岦帺懱傪曄峏偟偰嬋偑傞傛偆偵側偭偰偄傑偡丅
偙偺婡峔偼柍帇偟偰僶僂(慏庱)偺悈暯僗儔僗僞乕偩偗偱慁夞偡傞傛偆偵偟偰傕椙偄傫偱偡偑丄偲傝偁偊偢嵞尰弌棃傞傕偺側傜嵞尰偟偨偄強側偺偱儔僕僐儞僇乕梡偺儐僯僶乕僒儖僕儑僀儞僩傪巊偆偙偲偵偟傑偡丅
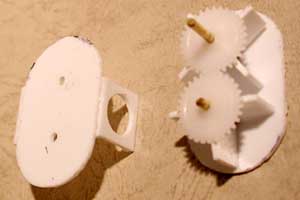
儅僌僱僢僩僇僢僾儕儞僌丄儐僯僶乕僒儖僕儑僀儞僩丄僗僋儕儏乕傑偱傪慻傫偩偺偑塃偺幨恀偱偡丅
 崱傑偱偵嶌偭偨晹暘傪慻傒棫偰偰僶僀僗偱屌掕偟偨偺偑塃偺幨恀偱偡丅
崱傑偱偵嶌偭偨晹暘傪慻傒棫偰偰僶僀僗偱屌掕偟偨偺偑塃偺幨恀偱偡丅
幨恀偱偼敾傝偵偔偄偐傕抦傟傑偣傫偑丄儅僌僱僢僩僇僢僾儕儞僌偱嵍塃偑姰慡偵暘棧偟偰偄傑偡丅
 儌乕僞乕揹埑偼3V乣6V丄儅僌僱僢僩僇僢僾儕儞僌娫妘偼5mm乣10mm偱摦嶌僥僗僩偟傑偟偨丅晧壸偑戝偒偡偓傞偺偐懡彮儌乕僞乕偑抔偐偔側傝傑偡偑僗僋儕儏乕傕栤戣側偔嬋偘傞偙偲偑弌棃傑偟偨丅
儌乕僞乕揹埑偼3V乣6V丄儅僌僱僢僩僇僢僾儕儞僌娫妘偼5mm乣10mm偱摦嶌僥僗僩偟傑偟偨丅晧壸偑戝偒偡偓傞偺偐懡彮儌乕僞乕偑抔偐偔側傝傑偡偑僗僋儕儏乕傕栤戣側偔嬋偘傞偙偲偑弌棃傑偟偨丅
晧壸偼儅僌僱僢僩僇僢僾儕儞僌晹偵偐偐偭偰偄傞傛偆偱偡丅偙偙偵偼僥僼儘儞儚僢僔儍乕傪擖傟偰偄傑偡偑丄偪傖傫偲偟偨僗儔僗僩儀傾儕儞僌傪擖傟偨曽偑椙偄偐傕抦傟傑偣傫丅
 彮偟栠偭偰僗儔僗僞乕傪夵椙偟傑偟偨丅
彮偟栠偭偰僗儔僗僞乕傪夵椙偟傑偟偨丅
擇偮偺塇晹傪慻傒崌傢偣傞宍偺僗儔僗僞乕傪帋嶌偟傑偟偨丅
傑偢暯僊傾傪晅偗偨巐枃塇偺僗儔僗僞乕傪擇偮嶌傝傑偡丅
師偵僇僶乕偺暯柺晹暘傪1.2mm僾儔斅偱嶌傝丄僗儔僗僞乕傪嵎偟崬傒傑偡丅
 僇僶乕偺嬋柺晹暘傪0.5mm僾儔斅偱嶌傝丄價僯乕儖僥乕僾偱壖巭傔偟傑偟偨丅
僇僶乕偺嬋柺晹暘傪0.5mm僾儔斅偱嶌傝丄價僯乕儖僥乕僾偱壖巭傔偟傑偟偨丅
偙傟傪儌乕僞乕偵宷偓3V偱嬱摦偟偰傒偨偺偱偡偑丄堦幉偺傕偺偲斾傋悈棳検偼傾僢僾偟偰偄傞傛偆偱偡丅
偲傝偁偊偢偼偙偺擇幉宆偱傕偆彮偟傑偲傕側傕偺傪帋嶌偟偰傒傑偡偑丄悈棳検偼崱傑偱尒偨栚偩偗偱妋擣偟偰偄傑偟偨偑丄掕検揑偵寁傞偨傔偵崱屻壗傜偐偺應掕憰抲傪嶌偭偨曽偑椙偄偐傕抦傟傑偣傫丅
慏懱偺惢嶌
 慏懱偺惢嶌偼婎慴媄弍偺帋嶌偑廔傢偭偰偐傜偲巚偭偰偄傑偟偨偑丄RC娡戉偝傫偐傜嶌傝偐偗偺偟傫偐偄6500偺慏懱傪忳偭偰捀偒傑偟偨偺偱丄慏懱偵娭偟偰偼敿暘埲忋偺巇帠偑廔傢偭偰偟傑偄傑偟偨丅偳偆傕偁傝偑偲偆偛偞偄傑偡>RC娡戉偝傫
慏懱偺惢嶌偼婎慴媄弍偺帋嶌偑廔傢偭偰偐傜偲巚偭偰偄傑偟偨偑丄RC娡戉偝傫偐傜嶌傝偐偗偺偟傫偐偄6500偺慏懱傪忳偭偰捀偒傑偟偨偺偱丄慏懱偵娭偟偰偼敿暘埲忋偺巇帠偑廔傢偭偰偟傑偄傑偟偨丅偳偆傕偁傝偑偲偆偛偞偄傑偡>RC娡戉偝傫
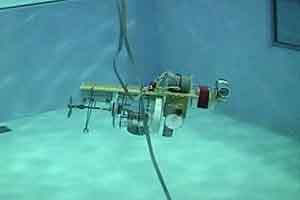
塃偺幨恀偑捀偄偨慏懱偱偡丅僗僋儕儏乕晹傪娷傑側偄慡挿偑栺50cm偱巹偺慱偭偰偄偨僒僀僘傛傝彮偟偩偗戝偒偄偩偗偱偟偨偺偱峫偊偰偄偨婡峔偼偤傫傇擖傟傞偙偲偑弌棃偦偆偱偡丅
 偨偩偟埲壓偺揰偼廋惓傪擖傟偨偄偲巚偭偰偄傑偡丅
偨偩偟埲壓偺揰偼廋惓傪擖傟偨偄偲巚偭偰偄傑偡丅
丒僙僀儖偵CCD僇儊儔傪巇崬傓偙偲傪峫偊偰偄偨偲偺偙偲偱僙僀儖偺墶暆偑峀偔僨僼僅儖儊偝傟偰偄傑偡偺偱暆傪媗傔傞偙偲偵偟傑偡丅
丒尦偺愝寁偱偼僗儔僗僞乕傪巊偆偙偲傪帠傪憐掕偟偰偄側偐偭偨偨傔丄僗儔僗僞乕傪慻傒崬傓偨傔偺夵憿傪峴偄傑偡丅傎傏姰惉偟偰偄偨杊悈儃僢僋僗傪巊偆偲悅捈僗儔僗僞乕傪擖傟傞梋桾偑柍偔側傞偨傔杊悈儃僢僋僗偼帺嶌偡傞偙偲偵側傝偦偆偱偡丅
撪晹婡峔帋嶌
 8寧枛偵悈拞價乕僋儖岺妛儚乕僋僔儑僢僾偱僾乕儖偱憱峴偝偣傞婡夛偑偁偭偨偺偱偙傟偵崌傢偣偰丄偟傫偐偄3300偺撪晹婡峔偺帋嶌婡傪嶌傝帋尡憱峴偟偰偒傑偟偨丅
8寧枛偵悈拞價乕僋儖岺妛儚乕僋僔儑僢僾偱僾乕儖偱憱峴偝偣傞婡夛偑偁偭偨偺偱偙傟偵崌傢偣偰丄偟傫偐偄3300偺撪晹婡峔偺帋嶌婡傪嶌傝帋尡憱峴偟偰偒傑偟偨丅
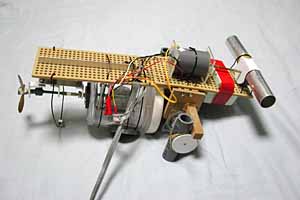
崱夞嶌偭偨帋嶌婡偼偙傟傑偱偵嶌偭偨僗儔僗僞乕傗儌乕僞乕丄晜椡嵽丄僂僄僀僩傪僞儈儎偺儐僯僶乕僒儖儃乕僪忋偵恓嬥傗價僯乕儖僥乕僾偱敍傝晅偗偨偩偗偺僶儔僢僋愽悈掵偱偡偑丄杮斣偱擖傟傛偆偲巚偭偰偄傞婡峔揑側晹暘偼慜屻僩儕儉僞儞僋埲奜偼慡偰娷傫偱偄傑偡丅
 揹巕惂屼宯偑慡偔庤偮偐偢側偺偱帋尡偼奺儌乕僞乕傊偺嫙媼揹埑偲嬌惈傪僗僀僢僠偱愗傝懼偊傞曽幃偱峴偄傑偟偨丅
揹巕惂屼宯偑慡偔庤偮偐偢側偺偱帋尡偼奺儌乕僞乕傊偺嫙媼揹埑偲嬌惈傪僗僀僢僠偱愗傝懼偊傞曽幃偱峴偄傑偟偨丅
杮斣偱偼PC偐傜USB宱桼偱僐儅儞僪傪憲傝儌乕僞乕偲僒乕儃傪嬱摦偟丄僙儞僒忣曬傪庴偗傞梊掕偱偡丅
慻傒棫偰屻丄傛偆傗偔晜偐傫偱偄傞掱搙偺晜椡偵挷惍偟傑偡丅偙偺偲偒慜屻偺僶儔儞僗傕曵傟側偄傛偆偵拲堄偟傑偡丅
崱夞偺帋尡偱妋擣偟偨偐偭偨偙偲偼偙傟傜偺崁栚偱偡丅
- 庡悇恑婡偺儅僌僱僢僩僇僢僾儕儞僌晹暘
- 庡悇恑婡偺儐僯僶乕僒儖僕儑僀儞僩晹暘
- 悅捈僗儔僗僞乕
- 僶僂僗儔僗僞乕
- 慜屻僩儕儉僞儞僋偵傛傞巔惃惂屼
- 庡婥枾幒偺3.3m偱偺悈枾
- 帺嶌悈拞儌乕僞乕偺3.3m偱偺悈枾
埲壓偵寢壥傪帵偟傑偡丅
丒庡悇恑婡偺儅僌僱僢僩僇僢僾儕儞僌晹暘
丂悈拞偱偼悈偺掞峈偺偨傔揹埑4.5V埲忋偱崅懍夞揮偝偣傛偆偲偡傞偲丄嬻夞傝偟偰惓忢偵夞揮偟側偔側傝傑偟偨丅
丂僗僋儕儏乕傪掅僺僢僠偵曄峏偡傞偐儅僌僱僢僩僇僢僾儕儞僌娫偺嫍棧傪傕偭偲抁偔偡傞丄傑偨偼帴愇傪嫮椡側傕偺偵岎姺偡傟偽峏偵崅夞揮偱傕戝忎晇偐傕偟傟傑偣傫偑崅懍夞揮偑昁梫側応崌偼儅僌僱僢僩僇僢僾儕儞僌偼偁傑傝揔偟偨曽朄偱偼側偝偦偆偱偡丅
丂偨偩偟丄尰忬4.5V偺嬱摦偱廫暘側悇恑懍搙偼摼傜傟傞偺偱丄偙偺傑傑巊偭偰傕椙偄偐傕偟傟傑偣傫丅
丒庡悇恑婡偺儐僯僶乕僒儖僕儑僀儞僩晹暘
丂偙傟傕嬻拞偱偼弴挷偵夞揮偟偰偄偨嬋偘妏搙偱傕丄悈拞偱偼嬻夞傝偟偰偟傑偄傑偟偨丅
丂嬻夞傝偟側偄嵟戝妏搙偱慁夞敿宎偼1m掱搙偱偟偨丅偙傟偵僶僂僗儔僗僞乕傪壛偊傞偲怣抧慁夞偵嬤偄摦偒傕壜擻偱偟偨丅
丂偨偩嬋偘妏搙偵傛傝偐側傝晧壸偑曄傢偭偰偔傞帠偲壜擻側嬋偘妏搙偑彫偝偄偨傔丄僋儔僂儞僊傾傪巊偭偨摦椡揱払曽幃偵曄偊偨曽偑椙偝偦偆偱偡丅
丒悅捈僗儔僗僞乕
丂崱夞悅捈僗儔僗僞乕偼悈幵偑捈宎25mm丄塇暆15mm丄塇悢4枃丄弌椡僷僀僾奜宍18mm/撪宎13mm丄儌乕僞乕偼RF-370偲偟傑偟偨丅嫙媼揹埑偼1.5V乣9V偱曄峏偱偒傞傛偆偵偟傑偟偨丄忋徃壓崀懍搙偼9V偱嬱摦偟偰傕偐側傝備偭偔傝偟偨傕偺偱偟偨偑僗働乕儖僗僺乕僪傪峫偊傟偽廫暘偲巚偄傑偡丅
偟偐偟丄晜椡傪拞惈晜椡偓傝偓傝偵挷惍偟偨偲偒丄怺搙2.5m掱搙傑偱偼帺桼偵忋徃偑岠偔偺偱偡偑3.3m偵拝掙偡傞偲悅捈僗儔僗僞乕慡奐偱傕忋徃偟側偄尰徾偑敪惗偟傑偟偨丅
懠偺嶲壛幰偵暦偄偰傒偨偲偙傠丄僶儔僗僩僞儞僋曽幃偺傕偺偱傕3.3m偵拝掙偟偰偟傑偆偲晜偐傃忋偑傟側偔側傞偙偲偑偁傞偲偺偙偲偱偟偨丅
尨場偼晜椡嵽偺悈埑偵傛傞廂弅丄悈掙嬤偔偺悈棳側偳怓乆峫偊傜傟傞偺偱偡偑丄僗儔僗僞乕悇椡傪傕偭偲忋偘偰傗傞偟偐側偝偦偆偱偡丅
悅捈僗儔僗僞乕偼悈幵乮僗僋儕儏乕幃傊偺曄峏傕娷傔偰乯傗儌乕僞乕傪曄峏(RC壔傕峫偊傞偲僇乕儃儞僽儔僔偺FK-280偁偨傝偑揔摉丠)偟偰悇椡偑忋偑傞傛偆偵夵椙偟偨偄偲巚偄傑偡丅
傑偨丄傕偆堦偮栤戣偲偟偰悅捈僗儔僗僞乕偩偗傪巊偄壓崀偝偣偨偲偒丄夞揮偟側偑傜壓崀偡傞偙偲偑傢偐傝傑偟偨丅偙傟偼偍偦傜偔嵍塃偺僗儔僗僞乕偺庢傝晅偗妏搙偵嵎偑偁傞偨傔偲巚傢傟傑偡丅偙傟偼庢傝晅偗偺妏搙傪挷惍偡傞偙偲偱廋惓壜擻偲巚傢傟傑偡丅
丒僶僂僗儔僗僞乕
丂僶僂僗儔僗僞乕偺悈幵偼捈宎25mm丄塇暆12mm丄塇悢4枃丄弌椡僷僀僾奜宍18mm/撪宎14 mm丄儌乕僞乕偼RF-370嬱摦揹埑6V埲壓偱廫暘慁夞偟偰偔傟傑偟偨丅
丂偙傟偼曄峏偡傞偙偲側偔偦偺傑傑巊梡偱偒偦偆偱偡丅
丒慜屻僩儕儉僞儞僋偵傛傞巔惃惂屼
丂偙傟偼僩儕儉僞儞僋偵側傞僔儕儞僕傪帩偭偰偄偔偺傪朰傟偰偟傑偭偨偺偱妋擣偱偒傑偣傫偱偟偨偺偱偍晽楥偱妋擣偡傞偙偲偵偟傑偡丅
偨偩50cc偺僔儕儞僕傪慜屻偵奺1屄巊偍偆偲偟偰偄偨偺偱偡偑晜椡挷惍帪偵悢g偺嵎偱丄偐側傝巔惃偑曄傢傝傑偟偨偺偱丄傕偭偲彫偝側僔儕儞僕偱傕椙偝偦偆偱偡丅
丒庡婥枾幒偺3.3m偱偺悈枾
丂庡婥枾幒偼尰嵼偼庡悇恑婡偺儌乕僞乕偲僊傾丄儅僌僱僢僩僇僢僾儕儞僌傪擖傟偰偄傑偡偑丄彨棃揑偵偼偙偙偵揹巕惂屼宯傗僒乕儃傕擖傟傞梊掕偱偡偺偱悈楻傟偼抳柦揑偱偡丅
丂偙傟偵娭偟偰偼僔儕僐儞僷僢僉儞僌晅偒偺怘昳曐懚梕婍傪棳梡偟偨偺偱偡偑儅僌僱僢僩僇僢僾儕儞僌偺偍偐偘偱慡偔栤戣偁傝傑偣傫偱偟偨丅
丒帺嶌悈拞儌乕僞乕偺3.3m偱偺悈枾
丂偙偪傜偼儌乕僞乕幉偺悈枾傪僶僗僐乕僋偱峴偭偰偄傞偺偱偡偑丄儌乕僞乕幉偺悈枾偵偼僶僗僐乕僋偱偼廫暘偱偼側偄傛偆偱懡彮悈楻傟偑尒傜傟傑偟偨丅
丂僗僞儞僠儏乕僽偲僌儕僗偱悈枾妋曐偟偨曽偑椙偝偦偆偱偡丅
偙傟傜偺帋尡寢壥偐傜傑偩懡彮偺栤戣偼偁傞傕偺偺丄崱偺峔惉偱傕夵椙偡傟偽傕怺搙3.3m偱妶摦偝偣傞偨傔偺婎慴媄弍偼弨旛偱偒偨傛偆偵巚偄傑偡偺偱偟傫偐偄3300(壖)偺(壖)傪奜偡帠偵偟傑偟偨丅
挿偔側偭偰偒偨偺偱丄偙偙傜偱儁乕僕傪暘妱偟傑偡丅懕偒偼帋嶌偦偺2偱偡丅
帋嶌偦偺1 帋嶌偦偺2
TOP傊栠傞