偽インチウァーム ヒメソコマタギモドキ ハバタキマンタモドキ
メカニマルは30年ほど前に作られた金属製の機械動物です。 メカニマルのレプリカという感じで学研からメカモというシリーズが市販されていました。また沖縄海洋博にも出品されていたようです。
本物のメカニマルは今でも静岡県清水市の東海大学海洋科学博物館で見ることが出来ます。 先日見に行って欲しくなったので、その中から簡単に作れそうなものを作ってみました。
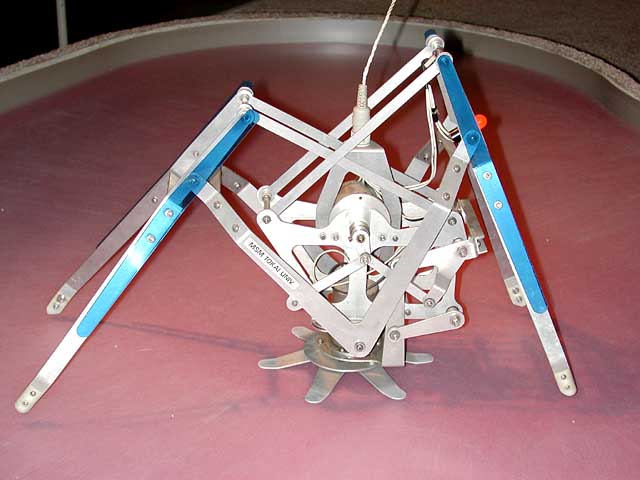
上が本物、下が偽物です。

メカニマルとしての名前はヒメソコマタギ、メカモではインチウァームという名前でした。
大きさはヒメソコマタギは50cmぐらい、インチウァームは30cmぐらい、偽物は18cmです。
とりあえず出来た図面のみ公開します。
(偽)インチウァーム部品図 JW_CADフォーマット図面 DXFフォーマット PDFフォーマット
(偽)インチウァーム部品加工図 JW_CADフォーマット図面 DXFフォーマット PDFフォーマット
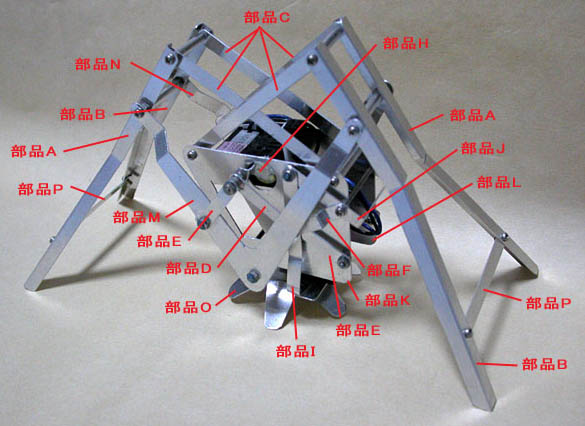
部品の対応図です。写真は試作品のため部品Iの形状が図面と異なっています。また部品Gは写真では見えませんが部品Oと回転用モーターの接続部です。
(偽)インチウァーム組図 JW_CADフォーマット図面 DXFフォーマット PDFフォーマット
組図を書いていて部品G,Hの間違いに気が付いたので修正しました。
また、図面は厚さ0.5mmの場合で書いています。
元の図面はJw_cad for Windowsフォーマットです。
アルミ板の切断や曲げについてはヤッシロメカトロ工作研究所の【アルミ板の切断】や【自作アルミ板折り曲げ器】を参考にして下さい。
このイベントがあることを知ったのが4月末で時間がなかったのですが、極力手抜きしてなんとか間に合いました。
動力としては水中モーターマブチS-1を改造して使用することを考えていたので、それに合わせて(偽)インチウァームの図面を2.5倍して製作しました。
とりあえず全て組んでみたところ、S-1ではトルクが足りなくてまともに動かず370モーターで水中モーターまで自作することになってしまいました。
Jw_cad for Windowsの公式ホームページ、またはVectorなどでダウンロードをお願いします。
ヒメソコマタギモドキ
横須賀の海洋科学技術センター(JAMSTEC)一般公開日('03.05.10)にイベントのひとつとして潜水艦のデモ走行があったので私も水中用メカニマルを作り最高深度3.3mで歩行させてきました。
本当ならば2mm厚のアルミ板を使いたいところですが時間が無いので1mm厚での製作です。
また足はL字アングルを使用することで折り曲げの手間を無くしました。
ギア部も田宮のユニバーサルギアボックスのモーター部を切断して使います。 写真は組み立て前の主要部品です。
写真は組み立て前の主要部品です。
自作水中モーターは塩ビパイプをモーターの長さに合わせて切り、片面はアクリル板をエポキシ接着剤で張り水抜き用の穴を開け通常はネジを締めて防水しています。もう片面は1mmのアルミ板で取り付け金具も兼ねています。
モーター軸はバスコークで防水しています、お風呂でのテストは30分沈めてもほとんど漏水しなかったのに1.5mプールでも10分もすると目に見えて漏水したため、定期的に引き上げ水抜きをする必用がありました。これは今後の課題です。 モーターとギア以外を組み立てて(偽)インチウァームと並べてみました。こんなに大きくなりました。
モーターとギア以外を組み立てて(偽)インチウァームと並べてみました。こんなに大きくなりました。
右下の灰色の物が自作水中モーターです。
大きさ的にインチウァームよりヒメソコマタギに近いので名前もヒメソコマタギモドキとしました。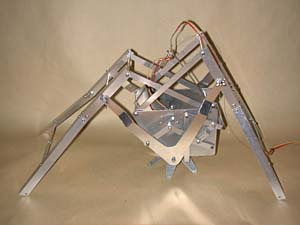 全て組み終わったところ。
全て組み終わったところ。 水深3.3mを歩行するヒメソコマタギモドキ。
水深3.3mを歩行するヒメソコマタギモドキ。![]() 写真のような格納形態に変形させることが出来ます。
写真のような格納形態に変形させることが出来ます。 ほんの少し時間が余ったのでヒメソコマタギモドキに取り付ける水中カメラも作りました。
ほんの少し時間が余ったのでヒメソコマタギモドキに取り付ける水中カメラも作りました。
基本的には\100ショップで買ったアクリル製の砂糖入れの頭を2つ張り合わせて作ったボールです。カメラの前だけは直径15mmの穴を開け2mmのアクリル板をはめ込んでいます。
接着面はエポキシ接着剤でしっかり固定したおかげで3.3mプールでも漏水は全くありませんでした。 水深1.5mのヒメソコマタギモドキからの映像。
水深1.5mのヒメソコマタギモドキからの映像。
被写体はムスカ(上)とアルファ級(下)
ハバタキマンタモドキ
 ヒメソコマタギモドキに続いてまた水物です。
ヒメソコマタギモドキに続いてまた水物です。
名前はハバタキマンタモドキですが実際のハバタキマンタとはかなり構造も違い潜水します。
全幅は50cm程度で最終的にはRCで操縦出来るようにする予定です。



動力部は280モーターを田宮の6速ギアで76.5:1に減速しています。
出力軸は真鍮パイプを組み合わせたスタンチューブを通して外部のクランクに伝達し、クランクで羽ばたき用の腕を駆動しています。
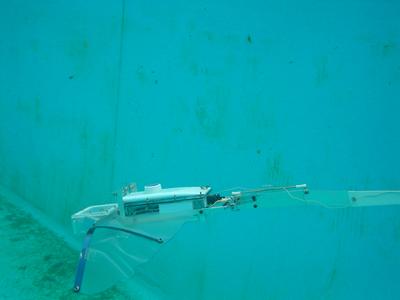
腕の先端部は焼き入りリボンを使っているので写真のように簡単に曲がり、これでマンタのゆったりした羽ばたきの再現を狙っています。
今は水中の羽ばたきで推進力を発生させることが出来るかの試験中ですが、お風呂テストでは狭くて確認が大変です。
試作の結果、羽形状をうまく調整すれば推進力は発生できそうな目処がついたので一般公開に向けて本番用の機体を製作開始しました。写真は完成後にまとめて撮ったため一部説明と異なる部分があります。


本体フレームは左右2本のL型アルミアングル材をアンダーガードを兼ねたコの字型に曲げた2mm*10mmのアルミ材で結合しています。(写真左)
本体フレーム前部には羽駆動用の腕を取り付けています。
試作ではギアボックス縦置きで羽駆動用の腕はギアボックスの出力から直接駆動していたため、本体が厚くなってしまいましたが、今回はギアボックスは横置き、羽駆動部は平行リンク機構(写真右)を使用して本体を薄くするようにしています。
羽駆動用の腕は試作と同じく先端部は焼き入りリボンです。メカニマルでは基本的に塗装はせず素材の色を生かす主義なのですが、焼き入りリボンは鉄製でそのままではあっという間に錆びてしまうため、これだけは白のラッカー塗料で塗装しています。
羽部は0.25mm厚の半透明のビニールを使用しています。
羽が多少たるむぐらいに取り付け、腕から後方へ焼き入りリボンの骨を付けて羽のばたつきを抑え、羽の上下動から後方への水流を作り出します。
 左右のアルミアングル間にバッテリー、受信機、アンプ、サーボ*2を入れたアクリル製防水ケースをネジ止めしています。この防水ケースは2mm厚のアクリル板で製作しました。ただし単純に接着剤で組んだだけでは強度や防水が心配なので、アクリル接着剤で箱を製作した後、補強用にアクリルの三角棒を各辺内側にエポキシ接着剤で接着、その上からバスコークを塗り防水強化しています。
左右のアルミアングル間にバッテリー、受信機、アンプ、サーボ*2を入れたアクリル製防水ケースをネジ止めしています。この防水ケースは2mm厚のアクリル板で製作しました。ただし単純に接着剤で組んだだけでは強度や防水が心配なので、アクリル接着剤で箱を製作した後、補強用にアクリルの三角棒を各辺内側にエポキシ接着剤で接着、その上からバスコークを塗り防水強化しています。
このケースはバッテリーの出し入れがあるため、上蓋を外せるようにしなければなりません。上蓋とケース下部の間は3mm厚の発泡ゴムをはさみ、上蓋をネジ止めすることで防水しています。問題点として上蓋のネジを締めるとゴムの弾力に負けて蓋が多少しなってしまいます。上蓋とネジ止め部だけでも3mm厚にした方が良かったかもしれません。
また、電源をON/OFFするたびに上蓋を開けるのはネジが10本もあり大変なので、上蓋にペットボトルのキャップ部を接着し、この中にスイッチを入れて蓋を開けなくても良いようにしています。
サーボのリンケージは防水ブーツで、モーターへの配線はバスコークで防水しています。
バッテリーは単三型ニッケル水素電池6本で7.2Vとしています。
受信機とサーボはFUTABA 6EXAのパークプレーンセットに同梱のR114FとS3103です。
もちろんクリスタルは地上用周波数に交換しています。
アンプはユニオン UA-10G。飛行機用アンプは小さくて安い物があり良いですね。通常の潜水艦にはバックがないので使えませんが、今回のハバタキマンタモドキはたとえモーターを逆転させたとしても前進するのでこれで十分です。
1mm*15mmのアルミを曲げて作ったモーターマウントを本体前部に取り付けモーター防水ケースをエポキシ接着剤で固定しています。モーター防水ケースは試作のままです。(写真左下)


本体後部には尾鰭型の潜舵と尾型の方向舵を装備しています。潜舵は0.7mmのアルミで作りヒンジは蝶番です。方向舵は基部のみ0.7mmアルミで尾自体は0.75mmのポリプロピレン樹脂板で柔軟に動くようにします。方向舵のヒンジは1mmアルミとφ2mm真鍮棒で作りました。(写真右上)
本体防水ケースと防水モーターケースの上にスタイロフォームを削って作った浮力材を取り付け、静止状態でほぼ中性浮力になるように調整します。
モーターケース上の浮力材はエポキシ接着剤で接着。本体ケース上の浮力材は蓋の開け閉めがあるため、アルミ製の爪とネジで固定するようにしています。
 これで一応完成です。
これで一応完成です。
全長 65cm
全幅 50cm
重量 640g
かかった費用は本体だけなら\3000程度。RCプロポを入れても\18000以下です。
4月25日にテスト走航してきました。
・バランス調整
沈まないギリギリの浮力に調整する必要があるのですが、お風呂テストとは水温が違ったせいか浮力材のスタイロフォームが水を吸ったのか重りを外して更に浮力材を追加する必要がありました。この微調整は毎回必要になりそうです。
・前進確認
全速前進でも人が歩くより遅いのですが問題なく前進してくれました。方向舵ニュートラルでも少し右曲がりの傾向があるようです。これは左右の羽の推進力のばらつきかな?
・旋回確認
上に書いたように右曲がりの傾向があり、左旋回がかなり大回りになってしまいます。方向舵の先端のポリプロピレン板は簡単に曲がってしまい、方向舵として有効な面積が足りないようです。右旋回ももう少し旋回半径が小さい方が望ましいため方向舵のアルミの部分を大きくする改良を行うことにします。
・潜航確認
全速前進で潜舵を最大まで下げても水面でジタバタするだけで、全く潜ってくれませんでした。


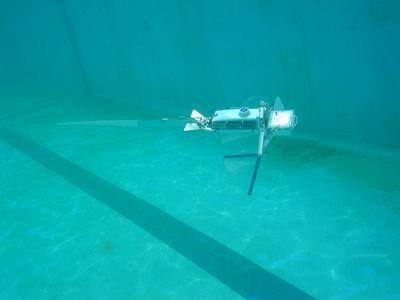
慌てず騒がず「こんな事もあろうかと思って秘かに開発しておいた」前部潜舵(写真左)を取り付け、後部潜舵と連動するようにロッドで連結(写真右)。駆動腕より前の羽は前部潜舵の邪魔になるため切断しました。
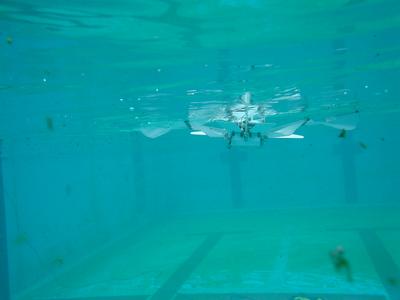
 写真では判りづらいかも知れませんが、完全に潜航しています。
写真では判りづらいかも知れませんが、完全に潜航しています。
1.5mまでの水深で10分ほど潜航させた後、引き上げて確認したところ、本体防水ケースは全く浸水無し。モーターケースは微量の浸水があったのですが、水はモーター自体には達していないため問題なさそうです。
1.5m以上の水深ではテストするつもりはなかったのですが、ぐるぐる旋回させているうちに3m近くまで潜ってしまいした。その後引き上げて確認したところ本体は微量の浸水。モーターは数ccの浸水、これもモーターには達していませんでした。安全深度は1.5mですが、多少の危険と後の手入れを覚悟すれば3mエリアでも遊べそうです。
一般公開までにあまり大きく手を入れてバランスを崩すのが嫌なので、モーターケースの浸水に関しては出力軸からと思われるのですが定期的にチェックし運用でカバーすることにします。恒久的には神戸サブマリンクラブ御用達のG4シールを採用したいところです。
・連続稼働時間
2000mAhのバッテリーでトータル1時間近く動かしたと思いますが、バッテリーは切れませんでした。バッテリーは急速充電器で1時間で充電できますのでAC電源か車がある所であればバッテリーが2セットあれば1日中遊んでいられます。
 以上のようにいくつか改善すべき所はありますが無事潜水しプールを走り回れたので名前から(仮)を外しました。
以上のようにいくつか改善すべき所はありますが無事潜水しプールを走り回れたので名前から(仮)を外しました。
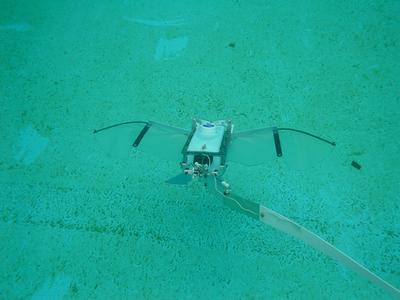
羽ばたき時に羽先端部が良い塩梅にしなり、単純な構造ながら動きは結構リアルに出来たと思います。また形状もマンタとは少し違ってしまいましたが十分エイ類に見えると思います。特にプールの底に写るシルエットを見ると自分で作っておきながら本物っぽいと思ってしまいます。
水物プラモや陸物RCは経験ありましたが、トイラジを除けば操縦も初めての水物RCとしては十分すぎる成果です。これも日本最高峰のRC潜水艦群を実際に見る機会があったことと、仕組みや製作過程などをWebで公開されているRC潜水艦製作の先輩たちのおかげです。どうもありがとうございました。
ハバタキマンタモドキは'04年5月15日の海洋研究開発機構一般公開のイベントの1つとしてRC潜水艦に混じってデモを行いました。
まずは実際のビデオをご覧下さい。
遊泳中 約1MB MPEGファイル
スペースシャトルとランデブー 約1.5MB MPEGファイル
シャトルとのランデブービデオはシャトルの作者のVoodooさんから頂きました。どうもありがとうございます。
今回は各30分のデモ3回に体験操縦2回を行いました。
浸水は相変わらずで沈んだままのこともありましたが、ダイバーの方がレスキューしてくれたおかげで無事続けることが出来ました。
浸水は前のテストと同じくモーターケースのみでしたので、大事には至りませんでしたが、安心して遊ぶためにモーターケースは作り直すことにします。
バッテリーは最初のセットのままで、3回目のデモ後も残っていました。
しかし4回目のデモの前に予備電池に変えたところでトラブル発生、急に動かなくなりました。電池ボックスに放電用に準備しておいた電球を付けても全く光らず接点が湿って接触が悪くなったようです。バッテリーを半田付けし、熱収縮チューブでまとめる改良を行うつもりです。
1号機はあまり小回りが効かなかったので、それを改善するために2号機を製作しました。
1号機を改造しても良かったのですが、全部作り直しても材料費はかからないので作り直しました。
1号機との差は水密ボックスの容量拡大、尾の二重関節化と浮力材のセッティングの変更だけです。 これだけの差ですが、実際に操縦してみるとかなり操縦特性は良くなりました。 ただ、操縦性と安定性は相反するもので、たまに勝手にロールしてしまうことがありました。
レガッタでの走行の様子です。
水中撮影 ヨッシー中佐
レガッタ直前の追浜での進水時の動画です。
前回の動画がまっすぐ泳いでいる映像中心だったので今回は旋回させてみました。2分12秒
2号機動画 約4MB MPEGファイル
2号機製作時の図面です。
部品図 JW_CADフォーマット図面
組立図 JW_CADフォーマット図面